
各区经科局,东湖高新区、武汉经开区、长江新区科创局,各有关单位:
为推动人形机器人领域科技创新与产业创新深度融合,加快培育和发展新质生产力,根据《武汉市科技计划体系改革优化方案》(武科〔2023〕126号)、《武汉市重点研发计划实施方案(试行)》(武科〔2024〕6号)》等文件精神,现将2025年度武汉市人形机器人领域重点研发计划项目申报工作有关事项通知如下:

人形机器人
一、支持重点
支持围绕武汉市人形机器人整机发展需求,聚焦人形机器人“大脑”“小脑”“肢体”“感知”等开展关键技术攻关和产业化应用,突出自主创新和产业带动,预期能形成产品化、场景化的标志性成果,加强部组件本地生产配套,有效提升人形机器人产业集群整体竞争力。指南方向详见附件1。
二、实施周期和支持额度
项目执行期原则上不超过2年。
单个项目支持额度原则上为100万元,鼓励申报单位自筹配套经费。
三、支持对象和申报要求
武汉市内依法注册,具有独立法人资格的企业、高校院所、新型研发机构、市级及以上创新平台等各类创新主体。鼓励采取产学研协同创新方式开展。
(一)项目申报单位要求
1. 申报单位为企业的,应满足以下条件:申报企业需主要从事人形机器人领域技术及产品的研究、开发、生产或服务等业务。企业上年度研发投入需满足以下任一条件:上年度研发投入原则上不低于150万元;或上年度研发投入在100万元以上150万元以下,但研发投入占销售收入比重不低于100%。对2024年以来新成立的企业,由高校院所团队创办,其在高校院所当年发生的机器人/人形机器人研发投入可并入新成立的企业计算;由汽车、机器人等领域企业将人形机器人相关业务剥离新成立的企业,其母公司当年发生的机器人/人形机器人研发投入可并入新成立的企业计算。
2. 项目合作单位(如有,含牵头单位)原则上不超过3个。武汉市外单位作为合作单位的,不参与分配市级财政资金。
3. 重点支持入库科技型中小企业、高新技术企业、专精特新企业、建有市级及以上科技创新平台的企业等。
(二)项目负责人要求
1. 项目负责人须为申报单位的在职人员(原则上以社保关系为准),科研信用记录良好。
2. 项目负责人应具有领导和组织开展创新性研究的能力,且为该项目主体研究思路的提出者和实际主持研究的科研人员。
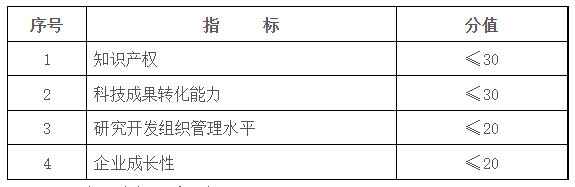
(三)考核指标要求
考核指标应精准且可量化、可考核。包括拟攻克技术、拟解决问题、拟开发新产品及其应用场景,并提出知识产权、经济和社会效益等预期指标。标志性成果为人形机器人零部件的,原则上要至少为1家本地整机企业提供配套服务。
四、申报推荐方式
(一)申报流程
本次项目申报全部通过网上申报,申报时间为4月28日至5月17日17:00。网上申报时无需提交纸质材料。
方式一:湖北科创供应链平台武汉节点(www.whwct.com)
1. 登录系统:登录湖北科创供应链平台武汉节点,进入项目申报模块。
2. 在线填写:通过项目负责人账户登录后,选择“产业创新专项—重点研发计划—人形机器人专项”点击“进入申报”,在线填写申报信息。
3. 上传附件:将签字盖章后的申报表及相关附件扫描后以PDF格式上传。确认无误后点击提交,申报材料提交至申报单位。
4. 单位审核:项目申报单位用单位账户登录,点击页面右上方“项目管理入口”,进入项目管理页面,点击“推荐”,申报完成(高校院所显示项目已提交至市科技创新局,其他单位显示项目已提交至区科技管理部门)。
方式二:市科技创新局官网(kjj.wuhan.gov.cn)
1. 登录系统:登录市科技创新局官网,点击“项目申报与管理—在线申报”,进入“网上办事大厅”。
2. 在线填写:通过项目负责人账户登录后,选择“2025年度项目-产业创新专项—重点研发计划—人形机器人专项”点击“进入申报”,在线填写申报信息。
3. 上传附件:将签字盖章后的申报表及相关附件扫描后以PDF格式上传。确认无误后点击提交,申报材料提交至申报单位。
4. 单位审核:项目申报单位用单位账户登录,点击“推荐”,申报完成(高校院所显示项目已提交至市科技创新局,其他单位显示项目已提交至区科技管理部门)。
(二)推荐要求
按归口管理原则,由各区科技管理部门、高校院所作为推荐单位统一推荐。各推荐单位认真遴选审查后,登录“武汉市科技创新局项目管理系统”进行网上推荐,并上传单位推荐函和推荐项目汇总表(汇总表由系统导出,网上提交盖章后的PDF扫描版及word版)。推荐截止时间为2025年5月17日17:00。
五、项目材料。
(一)《武汉市重点研发计划申报书》(附件2)
(二)附件清单
1. 申报单位信用信息报告。
2. 上年度财务审计报告(牵头单位为企业的,须提供)。如审计报告中不含研发投入,研发投入报表可从国家统计局相关统计平台导出,加盖单位公章。
3. 与申报项目有关的知识产权材料。
4. 合作协议(如有其他合作单位,须提供。协议应明确合作各方的合作方式、任务分工、知识产权归属、经费分配及预期目标等内容,并加盖双方单位公章;申报的合作事项应与合作协议相关内容一致)。
5. 按需提供其他相关证明材料。
(三)注意事项
1. 实行科研诚信事前承诺。申报单位、项目负责人申报时签署并提交《科研诚信承诺书》,应严格遵守承诺,如实填写并审核申报材料,并对申报材料的真实性、合法性、有效性负责。
2. 《武汉市重点研发计划申报书》的研究内容、项目总经费、考核目标等应与实施周期一致。
3. 以PDF格式上传的《武汉市重点研发计划申报书》应签字盖章,与在线填写内容一致。
4. 项目立项后,需提交1份纸质申报材料(与网上申报材料一致)、4份《武汉市科技计划项目任务书》(从申报系统导出打印,相关内容原则上不得调整)。
5. 申报单位应实事求是、科学合理编制经费预算。项目立项后,市科技研发资金资助额度低于申请经费时,差额部分由项目承担单位自筹配套解决。
六、申报限制
(一)已被纳入社会信用体系实施联合惩戒的单位和个人不得申报或参与申报。
(二)不符合有关保密规定的项目不得申报。
(三)已获得国家、省、市财政资助的项目不得重复申报。
(四)承担市科技计划项目且逾期未验收的单位(高校限制至二级学院,由高校负责审查)不得申报。
(五)同一项目负责人只能申报一项重点研发计划项目。已承担我市科技计划项目且未验收的项目负责人不得申报。今年已承担我市科技计划项目的企业不得申报。
武汉市科技创新局
2025 年度武汉市人形机器人领域重点研发计划项目申报指南
一、支持重点
支持围绕武汉市人形机器人整机发展需求,聚焦人形机器人“大脑”“小脑”“肢体”“感知”等开展关键技术攻关和产业化应用,突出自主创新和产业带动,预期能形成产品化、场景化的标志性成果,加强部组件本地生产配套,有效提升人形机器人产业集群整体竞争力。标志性成果为人形机器人零部件的,原则上要至少为1家本地整机企业提供配套服务。
二、指南方向
1.面向人形机器人大小脑应用的SoC芯片研发与应用
针对当前机器人大脑、小脑芯片多沿用通用芯片,以及算力、能效及适配性不足等问题,开展基于7nm工艺的国产高性能AI芯片技术及核心IP的自主研发与攻关,其中大脑芯片AI算力不低于200TOPS,CPU逻辑算力不低于250K DMIPS;小脑芯片AI算力不低于32TOPS,CPU逻辑算力不低于150KDMIPS。通过开发人形机器人的大脑、小脑计算单元,构建并部署一套参数不低于14B的端到端具身多模态大模型,完成AI通用工具链研发,实现低功耗和高性能的端侧推理。
2.人形机器人精确力感知高力矩密度一体化关节模组
针对人形机器人关节模组精确力感知和高扭矩密度需求,研究高精度力感知与力控技术、非线性摩擦力辨识、实时电机内阻检测、外部负载惯量辨识等核心技术,打造模块化、低成本、轻量化的高可靠力控关节模组,其中,旋转关节模组峰值扭矩>500Nm、扭矩重量比>120Nm/kg,直线关节模组峰值推力>10000N,推力重量比>5800N/kg,体积优化至同功率等级产品的80%。旋转关节位置跟踪误差≤0.01rad,直线关节重复定位精度达到±0.05mm,接触力检测精度±1N,适用于抓取操作、人机交互等多应用场景。
3.感规控一体化集成的柔性灵巧手系统研发
针对人形机器人领域中的柔性抓取需求,研发感规控一体化集成的柔性灵巧手,通过开发自适应学习算法,实现自动调整抓取策略,具备高效的自适应能力,能针对1000种以上日常物品实现精准抓取与高效操作,抓取重量比>5,传感器分辨率≥0.3N、单指响应时间≤0.1秒,产品可广泛应用于智能制造、精准医疗、物流配送等场景。
4.基于具身智能的口腔护理人形机器人灵巧手系统研发
针对口腔手术中传统人工护理存在效率低、标准化不足等问题,结合具身智能、多模态感知和仿生机械设计,开发面向医疗机构临床口腔护理配合应用场景的口腔护理人形机器人,开发不少于19个自由度的仿生灵巧手,基于视觉语言-动作模型(VLA)机器人操作技术,支持口腔狭窄空间内毫米级操作精度,定位误差≤0.5mm,研究动态场景下的路径规划与避障技术,实现自主导航决策,导航成功率≥80%,推动人形机器人灵巧手在医疗健康领域的深度应用,提升口腔护理效率与质量。
5.高性能人形机器人关节用新型电感式编码器研发
针对人形机器人关节定位等高精度需求,突破差分线圈阵列设计、锁相环、温度自补偿等技术,适用于恶劣环境下的高精度角度测量,实现内置温度漂移补偿0.001%FS/℃,非线性修正误差±0.05÷,支持-40℃~150℃全温域自动校准,同时具备超采样与噪声抑制功能,信噪比≥75dB,分辨率≥ 21bit。
6.人形机器人谐波减速器研发及应用
针对人形机器人对高精度、轻量化和长寿命谐波减速器的需求,开展人形机器人谐波减速器的研发,突破人形机器人谐波减速器齿形设计、制造工艺和功能检测等关键技术,研制的人形机器人谐波减速器传动误差小于1弧分,传动比30-200,较国内外同类产品重量减轻20%,使用寿命不少于15000 小时,在人形机器人领域进行应用示范。
7.面向人形机器人姿态控制应用的高性能MEMS惯性传感技术研究
面向人形机器人姿态控制对高性能、小型化惯性传感器的需求,突破三轴加速度计、陀螺仪结构设计、工艺制造、IMU标定、组合导航等关键技术,研制具有较强抗振动和抗抖动性能的MEMS高性能惯性传感器,俯仰角和横滚角静态精度≤0.1÷,陀螺零偏稳定性(1σ,10s平滑)≤0.2÷/h,三轴加速度计零偏稳定性(1σ,10s平滑)≤100μg。
8.人形机器人高性能六维力传感器的研发与应用
针对人形机器人六维力传感器过载能力低、稳定性及可靠性低等问题,开展低温漂半导体应变计及其粘贴工艺、低耦合六维力传感器弹性体、人形机器人力感知与力控制方法等研究,研制面向人形机器人手腕和足底的高性能六维力传感器,过载能力≥2000%F.S.、测量误差≤0.2%F.S.、维间耦合≤0.3%F.S.、采样频率≥3000HZ以及可承受人形机器人奔跑、跳跃等剧烈运动冲击力。
9.人形机器人电子鼻关键材料和器件研究
针对人形机器人在抢险救灾、矿井安全等特种作业场景中环境气体探测能力不足的问题,开展超敏复合气敏材料研发、MEMS集成化电子鼻器件制备及智能算法开发工作,达到对CH4≤100ppm,响应时间≤3min,NO2≤10ppb,H2、CO≤5ppm,响应时间≤30s,工作寿命 ≥2年,在锂离子燃爆、化学品泄漏等混合气体复杂工况中实现稳定服役的工程化应用。
10.面向人形机器人的三维运动姿态传感系统
针对人形机器人多关节电机的多维监测需求,利用分布式光纤传感技术结合高密度光纤光栅,建立机器人的运动姿态感知与抓取应力监测系统,提升人形机器人在复杂动态环境中的多维感知水平和精细操作能力,系统的应变测量范围:±8000 με,应变测量精度:±1με,应变传感分辨率≤1mm,三维传感空间分辨率≤10mm,系统三维运动姿态传感误差小
于1%,并在人形机器人上实现应用。
11.多模态传感技术在人形机器人机械手的融合应用
针对人形机器人机械手依赖传统单一传感器、感知维度有限、复杂环境适应性不足等问题,开展多模态传感技术、时空同步融合算法等攻关,通过融合可见光视觉、激光测距、红外感知等至少3种传感器,形成集成化微型感知单元,实现对物体颜色、形状、深度、温度等多维度信息的精准感知与环境参数自适应补偿,测量距离10-2000mm,全量程测量精度优于5mm,近距离测量精度优于1mm,视觉与深度对准偏差不高于1mm,在工业生产、物流仓储、高危环境下生产作业等实现场景应用。


















评论前必须登录!
注册